文章作者:Tyan
博客:noahsnail.com | CSDN | 简书
声明:作者翻译论文仅为学习,如有侵权请联系作者删除博文,谢谢!
翻译论文汇总:https://github.com/SnailTyan/deep-learning-papers-translation
Detecting Text in Natural Image with Connectionist Text Proposal Network
Abstract
We propose a novel Connectionist Text Proposal Network (CTPN) that accurately localizes text lines in natural image. The CTPN detects a text line in a sequence of fine-scale text proposals directly in convolutional feature maps. We develop a vertical anchor mechanism that jointly predicts location and text/non-text score of each fixed-width proposal, considerably improving localization accuracy. The sequential proposals are naturally connected by a recurrent neural network, which is seamlessly incorporated into the convolutional network, resulting in an end-to-end trainable model. This allows the CTPN to explore rich context information of image, making it powerful to detect extremely ambiguous text. The CTPN works reliably on multi-scale and multi-language text without further post-processing, departing from previous bottom-up methods requiring multi-step post filtering. It achieves 0.88 and 0.61 F-measure on the ICDAR 2013 and 2015 benchmarks, surpassing recent results [8,35] by a large margin. The CTPN is computationally efficient with 0.14s/image, by using the very deep VGG16 model [27]. Online demo is available at: http://textdet.com/.
摘要
我们提出了一种新颖的连接文本提议网络(CTPN),它能够准确定位自然图像中的文本行。CTPN直接在卷积特征映射中的一系列细粒度文本提议中检测文本行。我们开发了一个垂直锚点机制,联合预测每个固定宽度提议的位置和文本/非文本分数,大大提高了定位精度。序列提议通过循环神经网络自然地连接起来,该网络无缝地结合到卷积网络中,从而形成端到端的可训练模型。这使得CTPN可以探索丰富的图像上下文信息,使其能够检测极其模糊的文本。CTPN在多尺度和多语言文本上可靠地工作,而不需要进一步的后处理,脱离了以前的自底向上需要多步后过滤的方法。它在ICDAR 2013和2015的基准数据集上达到了0.88和0.61的F-measure,大大超过了最近的结果[8,35]。通过使用非常深的VGG16模型[27],CTPN的计算效率为0.14s每张图像。在线演示获取地址:http://textdet.com/。
Keywords
Scene text detection, convolutional network, recurrent neural network, anchor mechanism
关键词
场景文本检测;卷积网络;循环神经网络;锚点机制
1. Introduction
Reading text in natural image has recently attracted increasing attention in computer vision [8,14,15,10,35,11,9,1,28,32]. This is due to its numerous practical applications such as image OCR, multi-language translation, image retrieval, etc. It includes two sub tasks: text detection and recognition. This work focus on the detection task [14,1,28,32], which is more challenging than recognition task carried out on a well-cropped word image [15,9]. Large variance of text patterns and highly cluttered background pose main challenge of accurate text localization.
1. 引言
在自然图像中阅读文本最近在计算机视觉中引起越来越多的关注[8,14,15,10,35,11,9,1,28,32]。这是由于它的许多实际应用,如图像OCR,多语言翻译,图像检索等。它包括两个子任务:文本检测和识别。这项工作的重点是检测任务[14,1,28,32],这是比在一个良好的裁剪字图像[15,9]进行的识别任务更具有挑战性。文本模式的大变化和高度杂乱的背景构成了精确文本定位的主要挑战。
Current approaches for text detection mostly employ a bottom-up pipeline [28,1,14,32,33]. They commonly start from low-level character or stroke detection, which is typically followed by a number of subsequent steps: non-text component filtering, text line construction and text line verification. These multi-step bottom-up approaches are generally complicated with less robustness and reliability. Their performance heavily rely on the results of character detection, and connected-components methods or sliding-window methods have been proposed. These methods commonly explore low-level features (e.g., based on SWT [3,13], MSER [14,33,23], or HoG [28]) to distinguish text candidates from background. However, they are not robust by identifying individual strokes or characters separately, without context information. For example, it is more confident for people to identify a sequence of characters than an individual one, especially when a character is extremely ambiguous. These limitations often result in a large number of non-text components in character detection, causing main difficulties for handling them in following steps. Furthermore, these false detections are easily accumulated sequentially in bottom-up pipeline, as pointed out in [28]. To address these problems, we exploit strong deep features for detecting text information directly in convolutional maps. We develop text anchor mechanism that accurately predicts text locations in fine scale. Then, an in-network recurrent architecture is proposed to connect these fine-scale text proposals in sequences, allowing them to encode rich context information.
目前的文本检测方法大多采用自下而上的流程[28,1,14,32,33]。它们通常从低级别字符或笔画检测开始,后面通常会跟随一些后续步骤:非文本组件过滤,文本行构建和文本行验证。这些自底向上的多步骤方法通常复杂,鲁棒性和可靠性较差。它们的性能很大程度上依赖于字符检测的结果,并且已经提出了连接组件方法或滑动窗口方法。这些方法通常探索低级特征(例如,基于SWT[3,13],MSER[14,33,23]或HoG[28])来区分候选文本和背景。但是,如果没有上下文信息,他们不能鲁棒的单独识别各个笔划或字符。例如,相比单个字符人们更信任一个字符序列,特别是当一个字符非常模糊时。这些限制在字符检测中通常会导致大量非文本组件,在后续步骤中的主要困难是处理它们。此外,正如[28]所指出的,这些误检很容易在自下而上的过程中连续累积。为了解决这些问题,我们利用强大的深度特征直接在卷积映射中检测文本信息。我们开发的文本锚点机制能在细粒度上精确预测文本位置。然后,我们提出了一种网内循环架构,用于按顺序连接这些细粒度的文本提议,从而允许它们编码丰富的上下文信息。
Deep Convolutional Neural Networks (CNN) have recently advanced general object detection substantially [25,5,6]. The state-of-the-art method is Faster Region-CNN (R-CNN) system [25] where a Region Proposal Network (RPN) is proposed to generate high-quality class-agnostic object proposals directly from convolutional feature maps. Then the RPN proposals are fed into a Fast R-CNN [5] model for further classification and refinement, leading to the state-of-the-art performance on generic object detection. However, it is difficult to apply these general object detection systems directly to scene text detection, which generally requires a higher localization accuracy. In generic object detection, each object has a well-defined closed boundary [2], while such a well-defined boundary may not exist in text, since a text line or word is composed of a number of separate characters or strokes. For object detection, a typical correct detection is defined loosely, e.g., by an overlap of > 0.5 between the detected bounding box and its ground truth (e.g., the PASCAL standard [4]), since people can recognize an object easily from major part of it. By contrast, reading text comprehensively is a fine-grained recognition task which requires a correct detection that covers a full region of a text line or word. Therefore, text detection generally requires a more accurate localization, leading to a different evaluation standard, e.g., the Wolf’s standard [30] which is commonly employed by text benchmarks [19,21].
深度卷积神经网络(CNN)最近已经基本实现了一般物体检测[25,5,6]。最先进的方法是Faster Region-CNN(R-CNN)系统[25],其中提出了区域提议网络(RPN)直接从卷积特征映射中生成高质量类别不可知的目标提议。然后将RPN提议输入Faster R-CNN[5]模型进行进一步的分类和微调,从而实现通用目标检测的最新性能。然而,很难将这些通用目标检测系统直接应用于场景文本检测,这通常需要更高的定位精度。在通用目标检测中,每个目标都有一个明确的封闭边界[2],而在文本中可能不存在这样一个明确定义的边界,因为文本行或单词是由许多单独的字符或笔划组成的。对于目标检测,典型的正确检测是松散定义的,例如,检测到的边界框与其实际边界框(例如,PASCAL标准[4])之间的重叠>0.5,因为人们可以容易地从目标的主要部分识别它。相比之下,综合阅读文本是一个细粒度的识别任务,需要正确的检测,覆盖文本行或字的整个区域。因此,文本检测通常需要更准确的定义,导致不同的评估标准,例如文本基准中常用的Wolf标准[19,21]。
In this work, we fill this gap by extending the RPN architecture [25] to accurate text line localization. We present several technical developments that tailor generic object detection model elegantly towards our problem. We strive for a further step by proposing an in-network recurrent mechanism that allows our model to detect text sequence directly in the convolutional maps, avoiding further post-processing by an additional costly CNN detection model.
在这项工作中,我们通过将RPN架构[25]扩展到准确的文本行定义来填补这个空白。我们提出了几种技术发展,针对我们的问题可以优雅地调整通用目标检测模型。我们通过提出一种网络内循环机制争取更进一步,使我们的模型能够直接在卷积映射中检测文本序列,避免通过额外昂贵的CNN检测模型进行进一步的后处理。
1.1 Contributions
We propose a novel Connectionist Text Proposal Network (CTPN) that directly localizes text sequences in convolutional layers. This overcomes a number of main limitations raised by previous bottom-up approaches building on character detection. We leverage the advantages of strong deep convolutional features and sharing computation mechanism, and propose the CTPN architecture which is described in Fig. 1. It makes the following major contributions:
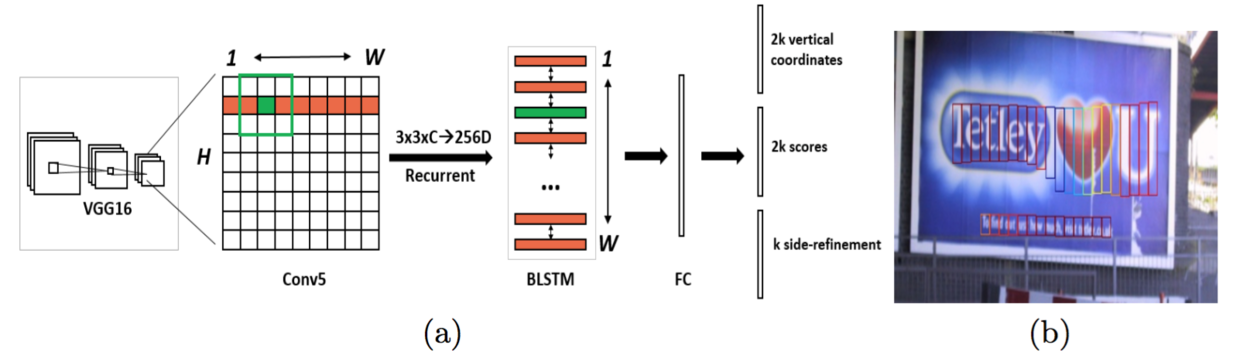
Fig. 1: (a) Architecture of the Connectionist Text Proposal Network (CTPN). We densely slide a 3×3 spatial window through the last convolutional maps (conv5 ) of the VGG16 model [27]. The sequential windows in each row are recurrently connected by a Bi-directional LSTM (BLSTM) [7], where the convolutional feature (3×3×C) of each window is used as input of the 256D BLSTM (including two 128D LSTMs). The RNN layer is connected to a 512D fully-connected layer, followed by the output layer, which jointly predicts text/non-text scores, y-axis coordinates and side-refinement offsets of $k$ anchors. (b) The CTPN outputs sequential fixed-width fine-scale text proposals. Color of each box indicates the text/non-text score. Only the boxes with positive scores are presented.
1.1 贡献
我们提出了一种新颖的连接文本提议网络(CTPN),它可以直接定位卷积层中的文本序列。这克服了以前的建立在字符检测基础上的自下而上方法带来的一些主要限制。我们利用强深度卷积特性和共享计算机制的优点,提出了如图1所示的CTPN架构。主要贡献如下:
图1:(a)连接文本提议网络(CTPN)的架构。我们通过VGG16模型[27]的最后一个卷积映射(conv5)密集地滑动3×3空间窗口。每行的序列窗口通过双向LSTM(BLSTM)[7]循环连接,其中每个窗口的卷积特征(3×3×C)被用作256维的BLSTM(包括两个128维的LSTM)的输入。RNN层连接到512维的全连接层,接着是输出层,联合预测$k$个锚点的文本/非文本分数,y轴坐标和边缘调整偏移。(b)CTPN输出连续的固定宽度细粒度文本提议。每个框的颜色表示文本/非文本分数。只显示文本框正例的分数。
First, we cast the problem of text detection into localizing a sequence of fine-scale text proposals. We develop an anchor regression mechanism that jointly predicts vertical location and text/non-text score of each text proposal, resulting in an excellent localization accuracy. This departs from the RPN prediction of a whole object, which is difficult to provide a satisfied localization accuracy.
首先,我们将文本检测的问题转化为一系列细粒度的文本提议。我们开发了一个锚点回归机制,可以联合预测每个文本提议的垂直位置和文本/非文本分数,从而获得出色的定位精度。这背离了整个目标的RPN预测,RPN预测难以提供令人满意的定位精度。
Second, we propose an in-network recurrence mechanism that elegantly connects sequential text proposals in the convolutional feature maps. This connection allows our detector to explore meaningful context information of text line, making it powerful to detect extremely challenging text reliably.
其次,我们提出了一种在卷积特征映射中优雅连接序列文本提议的网络内循环机制。通过这种连接,我们的检测器可以探索文本行有意义的上下文信息,使其能够可靠地检测极具挑战性的文本。
Third, both methods are integrated seamlessly to meet the nature of text sequence, resulting in a unified end-to-end trainable model. Our method is able to handle multi-scale and multi-lingual text in a single process, avoiding further post filtering or refinement.
第三,两种方法无缝集成,以符合文本序列的性质,从而形成统一的端到端可训练模型。我们的方法能够在单个过程中处理多尺度和多语言的文本,避免进一步的后过滤或细化。
Fourth, our method achieves new state-of-the-art results on a number of benchmarks, significantly improving recent results (e.g., 0.88 F-measure over 0.83 in [8] on the ICDAR 2013, and 0.61 F-measure over 0.54 in [35] on the ICDAR 2015). Furthermore, it is computationally efficient, resulting in a 0.14s/image running time (on the ICDAR 2013) by using the very deep VGG16 model [27].
第四,我们的方法在许多基准数据集上达到了新的最先进成果,显著改善了最近的结果(例如,0.88的F-measure超过了2013年ICDAR的[8]中的0.83,而0.64的F-measure超过了ICDAR2015上[35]中的0.54 )。此外,通过使用非常深的VGG16模型[27],这在计算上是高效的,导致了每张图像0.14s的运行时间(在ICDAR 2013上)。
2. Related Work
Text detection. Past works in scene text detection have been dominated by bottom-up approaches which are generally built on stroke or character detection. They can be roughly grouped into two categories, connected-components (CCs) based approaches and sliding-window based methods. The CCs based approaches discriminate text and non-text pixels by using a fast filter, and then text pixels are greedily grouped into stroke or character candidates, by using low-level properties, e.g., intensity, color, gradient, etc. [33,14,32,13,3]. The sliding-window based methods detect character candidates by densely moving a multi-scale window through an image. The character or non-character window is discriminated by a pre-trained classifier, by using manually-designed features [28,29], or recent CNN features [16]. However, both groups of methods commonly suffer from poor performance of character detection, causing accumulated errors in following component filtering and text line construction steps. Furthermore, robustly filtering out non-character components or confidently verifying detected text lines are even difficult themselves [1,33,14]. Another limitation is that the sliding-window methods are computationally expensive, by running a classifier on a huge number of the sliding windows.
2. 相关工作
文本检测。过去在场景文本检测中的工作一直以自下而上的方法为主,一般建立在笔画或字符检测上。它们可以粗略地分为两类,基于连接组件(CC)的方法和基于滑动窗口的方法。基于CC的方法通过使用快速滤波器来区分文本和非文本像素,然后通过使用低级属性(例如强度,颜色,梯度等[33,14,32,13,3])将文本像素贪婪地分为笔划或候选字符。基于滑动窗口的方法通过在图像中密集地滑动多尺度窗口来检测候选字符。字符或非字符窗口通过预先训练的分类器,使用手动设计的特征[28,29]或最近的CNN特征[16]进行区分。然而,这两种方法通常都会受到较差的字符检测性能的影响,导致在接下来的组件过滤和文本行构建步骤中出现累积的错误。此外,强大地过滤非字符组件或者自信地验证检测到的文本行本身就更加困难[1,33,14]。另一个限制是通过在大量的滑动窗口上运行分类器,滑动窗口方法在计算上是昂贵的。
Object detection. Convolutional Neural Networks (CNN) have recently advanced general object detection substantially [25,5,6]. A common strategy is to generate a number of object proposals by employing inexpensive low-level features, and then a strong CNN classifier is applied to further classify and refine the generated proposals. Selective Search (SS) [4] which generates class-agnostic object proposals, is one of the most popular methods applied in recent leading object detection systems, such as Region CNN (R-CNN) [6] and its extensions [5]. Recently, Ren et al. [25] proposed a Faster R-CNN system for object detection. They proposed a Region Proposal Network (RPN) that generates high-quality class-agnostic object proposals directly from the convolutional feature maps. The RPN is fast by sharing convolutional computation. However, the RPN proposals are not discriminative, and require a further refinement and classification by an additional costly CNN model, e.g., the Fast R-CNN model [5]. More importantly, text is different significantly from general objects, making it difficult to directly apply general object detection system to this highly domain-specific task.
目标检测。卷积神经网络(CNN)近来在通用目标检测[25,5,6]上已经取得了实质的进步。一个常见的策略是通过使用廉价的低级特征来生成许多目标提议,然后使用强CNN分类器来进一步对生成的提议进行分类和细化。生成类别不可知目标提议的选择性搜索(SS)[4]是目前领先的目标检测系统中应用最广泛的方法之一,如CNN(R-CNN)[6]及其扩展[5]。最近,Ren等人[25]提出了Faster R-CNN目标检测系统。他们提出了一个区域提议网络(RPN),可以直接从卷积特征映射中生成高质量的类别不可知的目标提议。通过共享卷积计算RPN是快速的。然而,RPN提议不具有判别性,需要通过额外的成本高昂的CNN模型(如Fast R-CNN模型[5])进一步细化和分类。更重要的是,文本与一般目标有很大的不同,因此很难直接将通用目标检测系统应用到这个高度领域化的任务中。
3. Connectionist Text Proposal Network
This section presents details of the Connectionist Text Proposal Network (CTPN). It includes three key contributions that make it reliable and accurate for text localization: detecting text in fine-scale proposals, recurrent connectionist text proposals, and side-refinement.
3. 连接文本提议网络
本节介绍连接文本提议网络(CTPN)的细节。它包括三个关键的贡献,使文本定位可靠和准确:检测细粒度提议中的文本,循环连接文本提议和边缘细化。
3.1 Detecting Text in Fine-scale Proposals
Similar to Region Proposal Network (RPN) [25], the CTPN is essentially a fully convolutional network that allows an input image of arbitrary size. It detects a text line by densely sliding a small window in the convolutional feature maps, and outputs a sequence of fine-scale (e.g., fixed 16-pixel width) text proposals, as shown in Fig. 1 (b).
3.1 在细粒度提议中检测文本
类似于区域提议网络(RPN)[25],CTPN本质上是一个全卷积网络,允许任意大小的输入图像。它通过在卷积特征映射中密集地滑动小窗口来检测文本行,并且输出一系列细粒度的(例如,宽度为固定的16个像素)文本提议,如图1(b)所示。
We take the very deep 16-layer vggNet (VGG16) [27] as an example to describe our approach, which is readily applicable to other deep models. Architecture of the CTPN is presented in Fig. 1 (a). We use a small spatial window, 3×3, to slide the feature maps of last convolutional layer (e.g., the conv5 of the VGG16). The size of conv5 feature maps is determined by the size of input image, while the total stride and receptive field are fixed as 16 and 228 pixels, respectively. Both the total stride and receptive field are fixed by the network architecture. Using a sliding window in the convolutional layer allows it to share convolutional computation, which is the key to reduce computation of the costly sliding-window based methods.
我们以非常深的16层vggNet(VGG16)[27]为例来描述我们的方法,该方法很容易应用于其他深度模型。CTPN的架构如图1(a)所示。我们使用一个小的空间窗口3×3来滑动最后的卷积层特征映射(例如,VGG16的conv5)。conv5特征映射的大小由输入图像的大小决定,而总步长和感受野分别固定为16个和228个像素。网络架构决定总步长和感受野。在卷积层中使用滑动窗口允许它共享卷积计算,这是减少昂贵的基于滑动窗口的方法的计算量的关键。
Generally, sliding-window methods adopt multi-scale windows to detect objects of different sizes, where one window scale is fixed to objects of similar size. In [25], Ren et al. proposed an efficient anchor regression mechanism that allows the RPN to detect multi-scale objects with a single-scale window. The key insight is that a single window is able to predict objects in a wide range of scales and aspect ratios, by using a number of flexible anchors. We wish to extend this efficient anchor mechanism to our text task. However, text differs from generic objects substantially, which generally have a well-defined enclosed boundary and center, allowing inferring whole object from even a part of it [2]. Text is a sequence which does not have an obvious closed boundary. It may include multi-level components, such as stroke, character, word, text line and text region, which are not distinguished clearly between each other. Text detection is defined in word or text line level, so that it may be easy to make an incorrect detection by defining it as a single object, e.g., detecting part of a word. Therefore, directly predicting the location of a text line or word may be difficult or unreliable, making it hard to get a satisfied accuracy. An example is shown in Fig. 2, where the RPN is directly trained for localizing text lines in an image.

Fig. 2: Left: RPN proposals. Right: Fine-scale text proposals.
通常,滑动窗口方法采用多尺度窗口来检测不同尺寸的目标,其中一个窗口尺度被固定到与目标的尺寸相似。在[25]中,Ren等人提出了一种有效的锚点回归机制,允许RPN使用单尺度窗口检测多尺度目标。关键的洞察力是单个窗口能够通过使用多个灵活的锚点来预测各种尺度和长宽比的目标。我们希望将这种有效的锚点机制扩展到我们的文本任务。然而,实质上文本与普通目标不同,它们通常具有明确的封闭边界和中心,可以从它的一部分推断整个目标[2]。文本是一个没有明显封闭边界的序列。它可能包含多层次的组件,如笔划,字符,单词,文本行和文本区域等,这些组件之间没有明确区分。文本检测是在单词或文本行级别中定义的,因此通过将其定义为单个目标(例如检测单词的一部分)可能很容易进行错误的检测。因此,直接预测文本行或单词的位置可能很难或不可靠,因此很难获得令人满意的准确性。一个例子如图2所示,其中RPN直接被训练用于定位图像中的文本行。
图2:左:RPN提议。右:细粒度的文本提议。
We look for a unique property of text that is able to generalize well to text components in all levels. We observed that word detection by the RPN is difficult to accurately predict the horizontal sides of words, since each character within a word is isolated or separated, making it confused to find the start and end locations of a word. Obviously, a text line is a sequence which is the main difference between text and generic objects. It is natural to consider a text line as a sequence of fine-scale text proposals, where each proposal generally represents a small part of a text line, e.g., a text piece with 16-pixel width. Each proposal may include a single or multiple strokes, a part of a character, a single or multiple characters, etc. We believe that it would be more accurate to just predict the vertical location of each proposal, by fixing its horizontal location which may be more difficult to predict. This reduces the search space, compared to the RPN which predicts 4 coordinates of an object. We develop a vertical anchor mechanism that simultaneously predicts a text/non-text score and y-axis location of each fine-scale proposal. It is also more reliable to detect a general fixed-width text proposal than identifying an isolate character, which is easily confused with part of a character or multiple characters. Furthermore, detecting a text line in a sequence of fixed-width text proposals also works reliably on text of multiple scales and multiple aspect ratios.
我们寻找文本的独特属性,能够很好地概括各个层次的文本组件。我们观察到由RPN进行的单词检测很难准确预测单词的水平边,因为单词中的每个字符都是孤立的或分离的,这使得查找单词的开始和结束位置很混乱。显然,文本行是一个序列,它是文本和通用目标之间的主要区别。将文本行视为一系列细粒度的文本提议是很自然的,其中每个提议通常代表文本行的一小部分,例如宽度为16个像素的文本块。每个提议可能包含单个或多个笔划,字符的一部分,单个或多个字符等。我们认为,通过固定每个提议的水平位置来预测其垂直位置会更准确,水平位置更难预测。与预测目标4个坐标的RPN相比,这减少了搜索空间。我们开发了垂直锚点机制,可以同时预测每个细粒度提议的文本/非文本分数和y轴的位置。检测一般固定宽度的文本提议比识别分隔的字符更可靠,分隔字符容易与字符或多个字符的一部分混淆。此外,检测一系列固定宽度文本提议中的文本行也可以在多个尺度和多个长宽比的文本上可靠地工作。
To this end, we design the fine-scale text proposal as follow. Our detector investigates each spatial location in the conv5 densely. A text proposal is defined to have a fixed width of 16 pixels (in the input image). This is equal to move the detector densely through the conv5 maps, where the total stride is exactly 16 pixels. Then we design $k$ vertical anchors to predict $y$-coordinates for each proposal. The $k$ anchors have a same horizontal location with a fixed width of 16 pixels, but their vertical locations are varied in $k$ different heights. In our experiments, we use ten anchors for each proposal, $k=10$, whose heights are varied from 11 to 273 pixels (by $\div 0.7$ each time) in the input image. The explicit vertical coordinates are measured by the height and $y$-axis center of a proposal bounding box. We compute relative predicted vertical coordinates ($\textbf{v}$) with respect to the bounding box location of an anchor as, $$v_c=(c_y-c_y^a)/h^a, \qquad v_h=\log (h/h^a) \tag{1} $$$$v^*_c=(c^*_y-c_y^a)/h^a, \qquad v^*_h=\log (h^*/h^a)\tag{2}$$ where $\textbf{v}=\lbrace v_c,v_h \rbrace$ and $\textbf{v}^*=\lbrace v^*_c,v^*_h\rbrace$ are the relative predicted coordinates and ground truth coordinates, respectively. $c_y^a$ and $h^a$ are the center ($y$-axis) and height of the anchor box, which can be pre-computed from an input image. $c_y$ and $h$ are the predicted $y$-axis coordinates in the input image, while $c^*_y$ and $h^*$ are the ground truth coordinates. Therefore, each predicted text proposal has a bounding box with size of $h\times 16$ (in the input image), as shown in Fig. 1 (b) and Fig. 2 (right). Generally, an text proposal is largely smaller than its effective receptive field which is 228$\times$228.
为此,我们设计如下的细粒度文本提议。我们的检测器密集地调查了conv5中的每个空间位置。文本提议被定义为具有16个像素的固定宽度(在输入图像中)。这相当于在conv5的映射上密集地移动检测器,其中总步长恰好为16个像素。然后,我们设计$k$个垂直锚点来预测每个提议的$y$坐标。$k$个锚点具有相同的水平位置,固定宽度为16个像素,但其垂直位置在$k$个不同的高度变化。在我们的实验中,我们对每个提议使用十个锚点,$k=10$,其高度在输入图像中从11个像素变化到273个像素(每次$\div 0.7$)。明确的垂直坐标是通过提议边界框的高度和$y$轴中心来度量的。我们计算相对于锚点的边界框位置的相对预测的垂直坐标($\textbf{v}$),如下所示:$$v_c=(c_y-c_y^a)/h^a, \qquad v_h=\log (h/h^a) \tag{1} $$$$v^*_c=(c^*_y-c_y^a)/h^a, \qquad v^*_h=\log (h^*/h^a)\tag{2}$$ 其中$\textbf{v}=\lbrace v_c,v_h \rbrace$和$\textbf{v}^*=\lbrace v^*_c,v^*_h\rbrace$分别是相对于预测坐标和实际坐标。$c_y^a$和$h^a$是锚盒的中心($y$轴)和高度,可以从输入图像预先计算。$c_y$和$h$是输入图像中预测的$y$轴坐标,而$c^*_y$和$h^*$是实际坐标。因此,如图1(b)和图2(右)所示,每个预测文本提议都有一个大小为$h\times 16$的边界框(在输入图像中)。一般来说,文本提议在很大程度上要比它的有效感受野228$\times$228要小。
The detection processing is summarised as follow. Given an input image, we have $W \times H \times C$ conv5 features maps (by using the VGG16 model), where $C$ is the number of feature maps or channels, and $W \times H$ is the spatial arrangement. When our detector is sliding a 3$\times$3 window densely through the conv5, each sliding-window takes a convolutional feature of $3 \times 3 \times C$ for producing the prediction. For each prediction, the horizontal location ($x$-coordinates) and $k$-anchor locations are fixed, which can be pre-computed by mapping the spatial window location in the conv5 onto the input image. Our detector outputs the text/non-text scores and the predicted $y$-coordinates ($\textbf{v}$) for $k$ anchors at each window location. The detected text proposals are generated from the anchors having a text/non-text score of $>0.7$ (with non-maximum suppression). By the designed vertical anchor and fine-scale detection strategy, our detector is able to handle text lines in a wide range of scales and aspect ratios by using a single-scale image. This further reduces its computation, and at the same time, predicting accurate localizations of the text lines. Compared to the RPN or Faster R-CNN system [25], our fine-scale detection provides more detailed supervised information that naturally leads to a more accurate detection.
检测处理总结如下。给定输入图像,我们有$W \times H \times C$ conv5特征映射(通过使用VGG16模型),其中$C$是特征映射或通道的数目,并且$W \times H$是空间布置。当我们的检测器通过conv5密集地滑动3$\times$3窗口时,每个滑动窗口使用$3 \times 3 \times C$的卷积特征来产生预测。对于每个预测,水平位置($x$轴坐标)和$k$个锚点位置是固定的,可以通过将conv5中的空间窗口位置映射到输入图像上来预先计算。我们的检测器在每个窗口位置输出$k$个锚点的文本/非文本分数和预测的$y$轴坐标($\textbf{v}$)。检测到的文本提议是从具有$> 0.7 $(具有非极大值抑制)的文本/非文本分数的锚点生成的。通过设计的垂直锚点和细粒度的检测策略,我们的检测器能够通过使用单尺度图像处理各种尺度和长宽比的文本行。这进一步减少了计算量,同时预测了文本行的准确位置。与RPN或Faster R-CNN系统[25]相比,我们的细粒度检测提供更详细的监督信息,自然会导致更精确的检测。
3.2 Recurrent Connectionist Text Proposals
To improve localization accuracy, we split a text line into a sequence of fine-scale text proposals, and predict each of them separately. Obviously, it is not robust to regard each isolated proposal independently. This may lead to a number of false detections on non-text objects which have a similar structure as text patterns, such as windows, bricks, leaves, etc. (referred as text-like outliers in [13]). It is also possible to discard some ambiguous patterns which contain weak text information. Several examples are presented in Fig. 3 (top). Text have strong sequential characteristics where the sequential context information is crucial to make a reliable decision. This has been verified by recent work [9] where a recurrent neural network (RNN) is applied to encode this context information for text recognition. Their results have shown that the sequential context information is greatly facilitate the recognition task on cropped word images.

Fig. 3: Top: CTPN without RNN. Bottom: CTPN with RNN connection.
3.2 循环连接文本提议
为了提高定位精度,我们将文本行分成一系列细粒度的文本提议,并分别预测每个文本提议。显然,将每个孤立的提议独立考虑并不鲁棒。这可能会导致对与文本模式类似的非文本目标的误检,如窗口,砖块,树叶等(在文献[13]中称为类文本异常值)。还可以丢弃一些含有弱文本信息的模糊模式。图3给出了几个例子(上)。文本具有强大的序列特征,序列上下文信息对做出可靠决策至关重要。最近的工作已经证实了这一点[9],其中应用递归神经网络(RNN)来编码用于文本识别的上下文信息。他们的结果表明,序列上下文信息极大地促进了对裁剪的单词图像的识别任务。
图3:上:没有RNN的CTPN。下:有RNN连接的CTPN。
Motivated from this work, we believe that this context information may also be of importance for our detection task. Our detector should be able to explore this important context information to make a more reliable decision, when it works on each individual proposal. Furthermore, we aim to encode this information directly in the convolutional layer, resulting in an elegant and seamless in-network connection of the fine-scale text proposals. RNN provides a natural choice for encoding this information recurrently using its hidden layers. To this end, we propose to design a RNN layer upon the conv5, which takes the convolutional feature of each window as sequential inputs, and updates its internal state recurrently in the hidden layer, $H_t$, $$H_{t}=\varphi(H_{t-1}, X_t), \qquad t=1,2,…,W \tag{3}$$ where $X_t \in R^{3\times 3 \times C}$ is the input conv5 feature from $t$-th sliding-window (3$\times$3). The sliding-window moves densely from left to right, resulting in $t=1,2,…,W$ sequential features for each row. $W$ is the width of the conv5. $H_t$ is a recurrent internal state that is computed jointly from both current input ($X_t$) and previous states encoded in $H_{t-1}$. The recurrence is computed by using a non-linear function $\varphi$, which defines exact form of the recurrent model. We exploit the long short-term memory (LSTM) architecture [12] for our RNN layer. The LSTM was proposed specially to address vanishing gradient problem, by introducing three additional multiplicative gates: the input gate, forget gate and output gate. Details can be found in [12]. Hence the internal state in RNN hidden layer accesses the sequential context information scanned by all previous windows through the recurrent connection. We further extend the RNN layer by using a bi-directional LSTM, which allows it to encode the recurrent context in both directions, so that the connectionist receipt field is able to cover the whole image width, e.g., 228 $\times$ width. We use a 128D hidden layer for each LSTM, resulting in a 256D RNN hidden layer, $H_t \in R^{256}$.
受到这项工作的启发,我们认为这种上下文信息对于我们的检测任务也很重要。我们的检测器应该能够探索这些重要的上下文信息,以便在每个单独的提议中都可以做出更可靠的决策。此外,我们的目标是直接在卷积层中编码这些信息,从而实现细粒度文本提议优雅无缝的网内连接。RNN提供了一种自然选择,使用其隐藏层对这些信息进行循环编码。为此,我们提出在conv5上设计一个RNN层,它将每个窗口的卷积特征作为序列输入,并在隐藏层中循环更新其内部状态:$H_t$,$$H_{t}=\varphi(H_{t-1}, X_t), \qquad t=1,2,…,W \tag{3}$$其中$X_t \in R^{3\times 3 \times C}$是第$t$个滑动窗口(3$\times$3)的输入conv5特征。滑动窗口从左向右密集移动,导致每行的$t=1,2,…,W$序列特征。$W$是conv5的宽度。$H_t$是从当前输入($X_t$)和以$H_{t-1}$编码的先前状态联合计算的循环内部状态。递归是通过使用非线性函数$\varphi$来计算的,它定义了循环模型的确切形式。我们利用长短时记忆(LSTM)架构[12]作为我们的RNN层。通过引入三个附加乘法门:输入门,忘记门和输出门,专门提出了LSTM以解决梯度消失问题。细节可以在[12]中找到。因此,RNN隐藏层中的内部状态可以访问所有先前窗口通过循环连接扫描的序列上下文信息。我们通过使用双向LSTM来进一步扩展RNN层,这使得它能够在两个方向上对递归上下文进行编码,以便连接感受野能够覆盖整个图像宽度,例如228$\times$width。我们对每个LSTM使用一个128维的隐藏层,从而产生256维的RNN隐藏层$H_t \in R^{256}$。
The internal state in $H_t$ is mapped to the following FC layer, and output layer for computing the predictions of the t-th proposal. Therefore, our integration with the RNN layer is elegant, resulting in an efficient model that is end-to-end trainable without additional cost. The efficiency of the RNN connection is demonstrated in Fig. 3. Obviously, it reduces false detections considerably, and at the same time, recovers many missed text proposals which contain very weak text information.
$H_t$中的内部状态被映射到后面的FC层,并且输出层用于计算第$t$个提议的预测。因此,我们与RNN层的集成非常优雅,从而形成了一种高效的模型,可以在无需额外成本的情况下进行端到端的训练。RNN连接的功效如图3所示。显然,它大大减少了错误检测,同时还能够恢复很多包含非常弱的文本信息的遗漏文本提议。
3.3 Side-refinement
The fine-scale text proposals are detected accurately and reliably by our CTPN. Text line construction is straightforward by connecting continuous text proposals whose text/non-text score is $>0.7$. Text lines are constructed as follow. First, we define a paired neighbour ($B_j$) for a proposal $B_i$ as $B_j->B_i$, when (i) $B_j$ is the nearest horizontal distance to $B_i$, and (ii) this distance is less than 50 pixels, and (iii) their vertical overlap is $>0.7$. Second, two proposals are grouped into a pair, if $B_j->B_i$ and $B_i->B_j$. Then a text line is constructed by sequentially connecting the pairs having a same proposal.
3.3 边缘细化
我们的CTPN能够准确可靠地检测细粒度的文本提议。通过连接其文本/非文本分数为$>0.7$的连续文本提议,文本行的构建非常简单。文本行构建如下。首先,我们为提议$B_i$定义一个配对邻居($B_j$)作为$B_j->B_i$,当(i)$B_j$是最接近$B_i$的水平距离,(ii)该距离小于50像素,并且(iii)它们的垂直重叠是$>0.7$时。其次,如果$B_j->B_i$和$B_i->B_j$,则将两个提议分组为一对。然后通过顺序连接具有相同提议的对来构建文本行。
The fine-scale detection and RNN connection are able to predict accurate localizations in vertical direction. In horizontal direction, the image is divided into a sequence of equal 16-pixel width proposals. This may lead to an inaccurate localization when the text proposals in both horizontal sides are not exactly covered by a ground truth text line area, or some side proposals are discarded (e.g., having a low text score), as shown in Fig. 4. This inaccuracy may be not crucial in generic object detection, but should not be ignored in text detection, particularly for those small-scale text lines or words. To address this problem, we propose a side-refinement approach that accurately estimates the offset for each anchor/proposal in both left and right horizontal sides (referred as side-anchor or side-proposal). Similar to the y-coordinate prediction, we compute relative offset as, $$o=(x_{side}-c_x^a)/w^a, \quad o^*=(x^*_{side}-c_x^a)/w^a$$ where $x_{side}$ is the predicted $x$-coordinate of the nearest horizontal side (e.g., left or right side) to current anchor. $x^*_{side}$ is the ground truth (GT) side coordinate in $x$-axis, which is pre-computed from the GT bounding box and anchor location. $c_x^a$ is the center of anchor in $x$-axis. $w^a$ is the width of anchor, which is fixed, $w^a=16$ . The side-proposals are defined as the start and end proposals when we connect a sequence of detected fine-scale text proposals into a text line. We only use the offsets of the side-proposals to refine the final text line bounding box. Several detection examples improved by side-refinement are presented in Fig. 4. The side-refinement further improves the localization accuracy, leading to about $2\%$ performance improvements on the SWT and Multi-Lingual datasets. Notice that the offset for side-refinement is predicted simultaneously by our model, as shown in Fig. 1. It is not computed from an additional post-processing step.
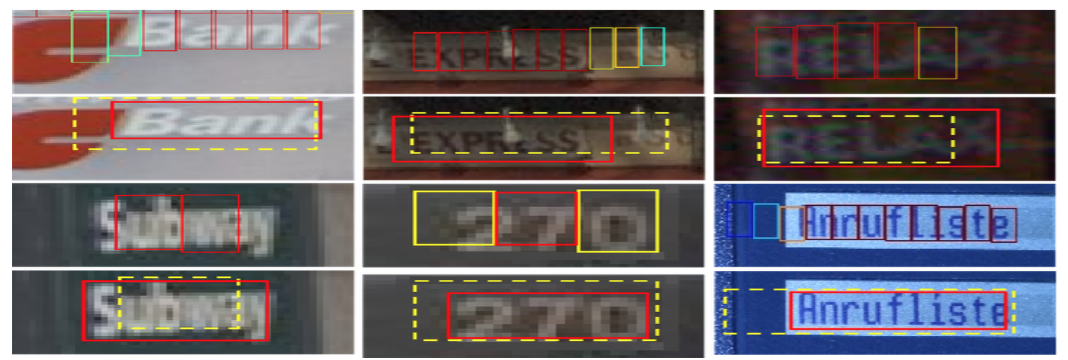
Fig.4: CTPN detection with (red box) and without (yellow dashed box) the side-refinement. Color of fine-scale proposal box indicate a text/non-text score.
细粒度的检测和RNN连接可以预测垂直方向的精确位置。在水平方向上,图像被分成一系列相等的宽度为16个像素的提议。如图4所示,当两个水平边的文本提议没有完全被实际文本行区域覆盖,或者某些边的提议被丢弃(例如文本得分较低)时,这可能会导致不准确的定位。这种不准确性在通用目标检测中可能并不重要,但在文本检测中不应忽视,特别是对于那些小型文本行或文字。为了解决这个问题,我们提出了一种边缘细化的方法,可以精确地估计左右两侧水平方向上的每个锚点/提议的偏移量(称为边缘锚点或边缘提议)。与y坐标预测类似,我们计算相对偏移为:$$o=(x_{side}-c_x^a)/w^a, \quad o^*=(x^*_{side}-c_x^a)/w^a$$,其中$x_{side}$是最接近水平边(例如,左边或右边)到当前锚点的预测的$x$坐标。$x^*_{side}$是$x$轴的实际(GT)边缘坐标,它是从实际边界框和锚点位置预先计算的。$c_x^a$是$x$轴的锚点的中心。$w^a$是固定的锚点宽度,$w^a=16$。当我们将一系列检测到的细粒度文本提议连接到文本行中时,这些提议被定义为开始和结束提议。我们只使用边缘提议的偏移量来优化最终的文本行边界框。通过边缘细化改进的几个检测示例如图4所示。边缘细化进一步提高了定位精度,从而使SWT和Multi-Lingual数据集上的性能提高了约$2\%$。请注意,我们的模型同时预测了边缘细化的偏移量,如图1所示。它不是通过额外的后处理步骤计算的。
图4:CTPN检测有(红色框)和没有(黄色虚线框)边缘细化。细粒度提议边界框的颜色表示文本/非文本分数。
3.4 Model Outputs and Loss Functions
The proposed CTPN has three outputs which are jointly connected to the last FC layer, as shown in Fig. 1 (a). The three outputs simultaneously predict text/non-text scores ($\textbf{s}$), vertical coordinates ($\textbf{v}=\lbrace v_c, v_h\rbrace$) in E.q. (2) and side-refinement offset ($\textbf{o}$). We explore $k$ anchors to predict them on each spatial location in the conv5, resulting in $2k$, $2k$ and $k$ parameters in the output layer, respectively.
3.4 模型输出与损失函数
提出的CTPN有三个输出共同连接到最后的FC层,如图1(a)所示。这三个输出同时预测公式(2)中的文本/非文本分数($ \ textbf {s} $),垂直坐标($\textbf{v}=\lbrace v_c, v_h\rbrace$)和边缘细化偏移($\textbf{o}$)。我们将探索$k$个锚点来预测它们在conv5中的每个空间位置,从而在输出层分别得到$2k$,$2k$和$k$个参数。
We employ multi-task learning to jointly optimize model parameters. We introduce three loss functions, $L^{cl}_s$, $L^{re}_v$ and $l^{re}_o$, which compute errors of text/non-text score, coordinate and side-refinement, respectively. With these considerations, we follow the multi-task loss applied in [5,25], and minimize an overall objective function ($L$) for an image as, $$L(\textbf{s}_i, \textbf{v}_j, \textbf{o}_k) =\frac1{N_{s}}\sum_iL^{cl}_{s}(\textbf{s}_i, \textbf{s}_i^*) +\frac{\lambda_1}{N_v}\sum_j L^{re}_v(\textbf{v}_j, \textbf{v}_j^*) +\frac{\lambda_2}{N_o}\sum_k L^{re}_o(\textbf{o}_k, \textbf{o}_k^*) \tag{5}$$ where each anchor is a training sample, and $i$ is the index of an anchor in a mini-batch. $\textbf{s}_i$ is the predicted probability of anchor $i$ being a true text. $\textbf{s}_i^*=\lbrace 0,1\rbrace$ is the ground truth. $j$ is the index of an anchor in the set of valid anchors for $y$-coordinates regression, which are defined as follow. A valid anchor is a defined positive anchor ($\textbf{s}_j^*=1$, described below), or has an Intersection-over-Union (IoU) $>0.5$ overlap with a ground truth text proposal. $\textbf{v}_j$ and $\textbf{v}_j^*$ are the prediction and ground truth $y$-coordinates associated with the $j$-{th} anchor. $k$ is the index of a side-anchor, which is defined as a set of anchors within a horizontal distance (e.g., 32-pixel) to the left or right side of a ground truth text line bounding box. $\textbf{o}_k$ and $\textbf{o}_k^*$ are the predicted and ground truth offsets in $x$-axis associated to the $k$-{th} anchor. $L^{cl}_s$ is the classification loss which we use Softmax loss to distinguish text and non-text. $L^{re}_v$ and $L^{re}_o$ are the regression loss. We follow previous work by using the smooth $L_1$ function to compute them [5, 25]. $\lambda_1$ and $\lambda_2$ are loss weights to balance different tasks, which are empirically set to 1.0 and 2.0. $N_{s}$ $N_{v}$ and $N_{o}$ are normalization parameters, denoting the total number of anchors used by $L^{cl}_s$, $L^{re}_v$ and $L^{re}_o$, respectively.
我们采用多任务学习来联合优化模型参数。我们引入了三种损失函数:$L^{cl}_s$,$L^{re}_v$和$l^{re}_o$,其分别计算文本/非文本分数,坐标和边缘细化。考虑到这些因素,我们遵循[5,25]中应用的多任务损失,并最小化图像的总体目标函数($L$)最小化:$$L(\textbf{s}_i, \textbf{v}_j, \textbf{o}_k) =\frac1{N_{s}}\sum_iL^{cl}_{s}(\textbf{s}_i, \textbf{s}_i^*) +\frac{\lambda_1}{N_v}\sum_j L^{re}_v(\textbf{v}_j, \textbf{v}_j^*) +\frac{\lambda_2}{N_o}\sum_k L^{re}_o(\textbf{o}_k, \textbf{o}_k^*) \tag{5}$$,其中每个锚点都是一个训练样本,$i$是一个小批量数据中一个锚点的索引。$\textbf{s}_i$是预测的锚点$i$作为实际文本的预测概率。$\textbf{s}_i^*=\lbrace 0,1\rbrace$是真实值。$j$是$y$坐标回归中有效锚点集合中锚点的索引,定义如下。有效的锚点是定义的正锚点($\textbf{s}_j^*=1$,如下所述),或者与实际文本提议重叠的交并比(IoU)$>0.5$。$\textbf{v}_j$和$\textbf{v}_j^*$是与第$j$个锚点关联的预测的和真实的$y$坐标。$k$是边缘锚点的索引,其被定义为在实际文本行边界框的左侧或右侧水平距离(例如32个像素)内的一组锚点。$\textbf{o}_k$和$\textbf{o}_k^*$是与第$k$个锚点关联的$x$轴的预测和实际偏移量。$L^{cl}_s$是我们使用Softmax损失区分文本和非文本的分类损失。$L^{re}_v$和$L^{re}_o$是回归损失。我们遵循以前的工作,使用平滑$L_1$函数来计算它们[5,25]。$\lambda_1$和$\lambda_2$是损失权重,用来平衡不同的任务,将它们经验地设置为1.0和2.0。$N_{s}$ $N_{v}$和$N_{o}$是标准化参数,表示$L^{cl}_s$,$L^{re}_v$,$L^{re}_o$分别使用的锚点总数。
3.5 Training and Implementation Details
The CTPN can be trained end-to-end by using the standard back-propagation and stochastic gradient descent (SGD). Similar to RPN [25], training samples are the anchors, whose locations can be pre computed in input image, so that the training labels of each anchor can be computed from corresponding GT box.
3.5 训练和实现细节
通过使用标准的反向传播和随机梯度下降(SGD),可以对CTPN进行端对端训练。与RPN[25]类似,训练样本是锚点,其位置可以在输入图像中预先计算,以便可以从相应的实际边界框中计算每个锚点的训练标签。
Training labels. For text/non-text classification, a binary label is assigned to each positive (text) or negative (non-text) anchor. It is defined by computing the IoU overlap with the GT bounding box (divided by anchor location). A positive anchor is defined as : (i) an anchor that has an $> 0.7$ IoU overlap with any GT box; or (ii) the anchor with the highest IoU overlap with a GT box. By the condition (ii), even a very small text pattern can assign a positive anchor. This is crucial to detect small-scale text patterns, which is one of key advantages of the CTPN. This is different from generic object detection where the impact of condition (ii) may be not significant. The negative anchors are defined as $<0.5$ IoU overlap with all GT boxes. The training labels for the $y$-coordinate regression ($\textbf{v}^*$) and offset regression ($\textbf{o}^*$) are computed as E.q. (2) and (4) respectively.
训练标签。对于文本/非文本分类,二值标签分配给每个正(文本)锚点或负(非文本)锚点。它通过计算与实际边界框的IoU重叠(除以锚点位置)来定义。正锚点被定义为:(i)与任何实际边界框具有$>0.7$的IoU重叠;或者(ii)与实际边界框具有最高IoU重叠。通过条件(ii),即使是非常小的文本模式也可以分为正锚点。这对于检测小规模文本模式至关重要,这是CTPN的主要优势之一。这不同于通用目标检测,通用目标检测中条件(ii)的影响可能不显著。负锚点定义为与所有实际边界框具有$<0.5$的IoU重叠。$y$坐标回归($\textbf{v}^*$)和偏移回归($\textbf{o}^*$)的训练标签分别按公式(2)和(4)计算。
Training data. In the training process, each mini-batch samples are collected randomly from a single image. The number of anchors for each mini-batch is fixed to $N_s=128$, with 1:1 ratio for positive and negative samples. A mini-patch is pad with negative samples if the number of positive ones is fewer than 64. Our model was trained on 3,000 natural images, including 229 images from the ICDAR 2013 training set. We collected the other images ourselves and manually labelled them with text line bounding boxes. All self-collected training images are not overlapped with any test image in all benchmarks. The input image is resized by setting its short side to 600 for training, while keeping its original aspect ratio.
训练数据。在训练过程中,每个小批量样本从单张图像中随机收集。每个小批量数据的锚点数量固定为$N_s=128$,正负样本的比例为1:1。如果正样本的数量少于64,则会用小图像块填充负样本。我们的模型在3000张自然图像上训练,其中包括来自ICDAR 2013训练集的229张图像。我们自己收集了其他图像,并用文本行边界框进行了手工标注。在所有基准测试集中,所有自我收集的训练图像都不与任何测试图像重叠。为了训练,通过将输入图像的短边设置为600来调整输入图像的大小,同时保持其原始长宽比。
Implementation Details. We follow the standard practice, and explore the very deep VGG16 model [27] pre-trained on the ImageNet data [26]. We initialize the new layers (e.g., the RNN and output layers) by using random weights with Gaussian distribution of 0 mean and 0.01 standard deviation. The model was trained end-to-end by fixing the parameters in the first two convolutional layers. We used 0.9 momentum and 0.0005 weight decay. The learning rate was set to 0.001 in the first 16K iterations, followed by another 4K iterations with 0.0001 learning rate. Our model was implemented in Caffe framework [17].
实现细节。我们遵循标准实践,并在ImageNet数据[26]上探索预先训练的非常深的VGG16模型[27]。我们通过使用具有0均值和0.01标准差的高斯分布的随机权重来初始化新层(例如,RNN和输出层)。该模型通过固定前两个卷积层中的参数进行端对端的训练。我们使用0.9的动量和0.0005的重量衰减。在前16K次迭代中,学习率被设置为0.001,随后以0.0001的学习率再进行4K次迭代。我们的模型在Caffe框架[17]中实现。
4. Experimental Results and Discussions
We evaluate the CTPN on five text detection benchmarks, namely the ICDAR 2011 [21], ICDAR 2013 [19], ICDAR 2015 [18], SWT [3], and Multilingual dataset [24]. In our experiments, we first verify the efficiency of each proposed component individually, e.g., the fine-scale text proposal detection or in-network recurrent connection. The ICDAR 2013 is used for this component evaluation.
4. 实验结果和讨论
我们在五个文本检测基准数据集上评估CTPN,即ICDAR 2011[21],ICDAR 2013[19],ICDAR 2015[18],SWT[3]和Multilingual[24]数据集。在我们的实验中,我们首先单独验证每个提议组件的效率,例如细粒度文本提议检测或网内循环连接。ICDAR 2013用于该组件的评估。
4.1 Benchmarks and Evaluation Metric
The ICDAR 2011 dataset [21] consists of 229 training images and 255 testing ones, where the images are labelled in word level. The ICDAR 2013 [19] is similar as the ICDAR 2011, and has in total 462 images, including 229 images and 233 images for training and testing, respectively. The ICDAR 2015 (Incidental Scene Text - Challenge 4) [18] includes 1,500 images which were collected by using the Google Glass. The training set has 1,000 images, and the remained 500 images are used for test. This dataset is more challenging than previous ones by including arbitrary orientation, very small-scale and low resolution text. The Multilingual scene text dataset is collected by [24]. It contains 248 images for training and 239 for testing. The images include multi-languages text, and the ground truth is labelled in text line level. Epshtein et al. [3] introduced the SWT dataset containing 307 images which include many extremely small-scale text.
4.1 基准数据集和评估标准
ICDAR 2011数据集[21]由229张训练图像和255张测试图像组成,图像以字级别标记。ICDAR 2013[19]与ICDAR 2011类似,共有462张图像,其中包括229张训练图像和233张测试图像。ICDAR 2015年(Incidental Scene Text —— Challenge 4)[18]包括使用Google Glass收集的1500张图像。训练集有1000张图像,剩余的500张图像用于测试。这个数据集比以前的数据集更具挑战性,包括任意方向,非常小的尺度和低分辨率的文本。Multilingual场景文本数据集由[24]收集。它包含248张训练图像和239张测试图像。图像包含多种语言的文字,并且真实值以文本行级别标注。Epshtein等[3]引入了包含307张图像的SWT数据集,其中包含许多极小尺度的文本。
We follow previous work by using standard evaluation protocols which are provided by the dataset creators or competition organizers. For the ICDAR 2011 we use the standard protocol proposed by [30], the evaluation on the ICDAR 2013 follows the standard in [19]. For the ICDAR 2015, we used the online evaluation system provided by the organizers as in [18]. The evaluations on the SWT and Multilingual datasets follow the protocols defined in [3] and [24] respectively.
我们遵循以前的工作,使用由数据集创建者或竞赛组织者提供的标准评估协议。对于ICDAR 2011,我们使用[30]提出的标准协议,对ICDAR 2013的评估遵循[19]中的标准。对于ICDAR 2015,我们使用了由组织者提供的在线评估系统[18]。SWT和Multilingual数据集的评估分别遵循[3]和[24]中定义的协议。
4.2 Fine-Scale Text Proposal Network with Faster R-CNN
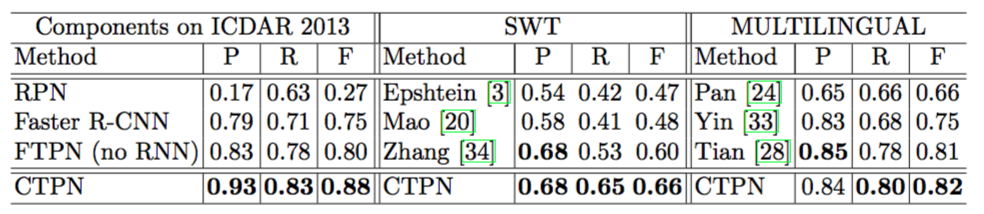
We first discuss our fine-scale detection strategy against the RPN and Faster R-CNN system [25]. As can be found in Table 1 (left), the individual RPN is difficult to perform accurate text localization, by generating a large amount of false detections (low precision). By refining the RPN proposals with a Fast R-CNN detection model [5], the Faster R-CNN system improves localization accuracy considerably, with a F-measure of 0.75. One observation is that the Faster R-CNN also increases the recall of original RPN. This may benefit from joint bounding box regression mechanism of the Fast R-CNN, which improves the accuracy of a predicted bounding box. The RPN proposals may roughly localize a major part of a text line or word, but they are not accurate enough by the ICDAR 2013 standard. Obviously, the proposed fine-scale text proposal network (FTPN) improves the Faster R-CNN remarkably in both precision and recall, suggesting that the FTPN is more accurate and reliable, by predicting a sequence of fine-scale text proposals rather than a whole text line.
Table 1: Component evaluation on the ICDAR 2013, and State-of-the-art results on the SWT and MULTILINGUAL.
4.2 具有Faster R-CNN的细粒度文本提议网络
我们首先讨论我们关于RPN和Faster R-CNN系统[25]的细粒度检测策略。如表1(左)所示,通过产生大量的错误检测(低精度),单独的RPN难以执行准确的文本定位。通过使用Fast R-CNN检测模型[5]完善RPN提议,Faster R-CNN系统显著提高了定位精度,其F-measure为0.75。一个观察结果是Faster R-CNN也增加了原始RPN的召回率。这可能受益于Fast R-CNN的联合边界框回归机制,其提高了预测边界框的准确性。RPN提议可以粗略定位文本行或文字的主要部分,但根据ICDAR 2013的标准这不够准确。显然,所提出的细粒度文本提议网络(FTPN)在精确度和召回率方面都显著改进了Faster R-CNN,表明通过预测一系列细粒度文本提议而不是整体文本行,FTPN更精确可靠。
表1:ICDAR 2013的组件评估以及在SWT和MULTILENGUAL数据集上的最新成果。
4.3 Recurrent Connectionist Text Proposals
We discuss impact of recurrent connection on our CTPN. As shown in Fig. 3, the context information is greatly helpful to reduce false detections, such as text-like outliers. It is of great importance for recovering highly ambiguous text (e.g., extremely small-scale ones), which is one of main advantages of our CTPN, as demonstrated in Fig. 6. These appealing properties result in a significant performance boost. As shown in Table 1 (left), with our recurrent connection, the CTPN improves the FTPN substantially from a F-measure of 0.80 to 0.88.

Fig.6: CTPN detection results on extremely small-scale cases (in red boxes), where some ground truth boxes are missed. Yellow boxes are the ground truth.
4.3 循环连接文本提议
我们讨论循环连接对CTPN的影响。如图3所示,上下文信息对于减少误检非常有用,例如类似文本的异常值。对于恢复高度模糊的文本(例如极小的文本)来说,这非常重要,这是我们CTPN的主要优势之一,如图6所示。这些吸引人的属性可显著提升性能。如表1(左)所示,使用我们的循环连接,CTPN大幅度改善了FTPN,将F-measure从0.80的提高到0.88。
图6:在极小尺度的情况下(红色框内)CTPN检测结果,其中一些真实边界框被遗漏。黄色边界箱是真实值。
Running time. The implementation time of our CTPN (for whole detection processing) is about 0.14s per image with a fixed short side of 600, by using a single GPU. The CTPN without the RNN connection takes about 0.13s/image GPU time. Therefore, the proposed in-network recurrent mechanism increase model computation marginally, with considerable performance gain obtained.
运行时间。通过使用单个GPU,我们的CTPN(用于整个检测处理)的执行时间为每张图像大约0.14s,固定短边为600。没有RNN连接的CTPN每张图像GPU时间大约需要0.13s。因此,所提出的网内循环机制稍微增加了模型计算,并获得了相当大的性能增益。
4.4 Comparisons with state-of-the-art results
Our detection results on several challenging images are presented in Fig. 5. As can be found, the CTPN works perfectly on these challenging cases, some of which are difficult for many previous methods. It is able to handle multi-scale and multi-language efficiently (e.g., Chinese and Korean).

Fig. 5: CTPN detection results several challenging images, including multi-scale and multi-language text lines. Yellow boxes are the ground truth.
4.4 与最新结果的比较
我们在几个具有挑战性的图像上的检测结果如图5所示。可以发现,CTPN在这些具有挑战性的情况上可以完美的工作,其中一些对于许多以前的方法来说是困难的。它能够有效地处理多尺度和多语言(例如中文和韩文)。
图5:CTPN在几个具有挑战性的图像上的检测结果,包括多尺度和多语言文本行。黄色边界框是真实值。
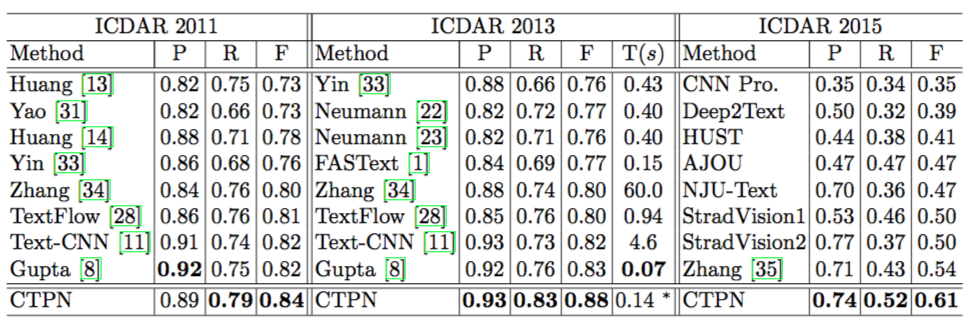
The full evaluation was conducted on five benchmarks. Image resolution is varied significantly in different datasets. We set short side of images to 2000 for the SWT and ICDAR 2015, and 600 for the other three. We compare our performance against recently published results in [1,28,34]. As shown in Table 1 and 2, our CTPN achieves the best performance on all five datasets. On the SWT, our improvements are significant on both recall and F-measure, with marginal gain on precision. Our detector performs favourably against the TextFlow on the Multilingual, suggesting that our method generalize well to various languages. On the ICDAR 2013, it outperforms recent TextFlow [28] and FASText [1] remarkably by improving the F-measure from 0.80 to 0.88. The gains are considerable in both precision and recall, with more than $+5\%$ and $+7\%$ improvements, respectively. In addition, we further compare our method against [8,11,35], which were published after our initial submission. It consistently obtains substantial improvements on F-measure and recall. This may due to strong capability of CTPN for detecting extremely challenging text, e.g., very small-scale ones, some of which are even difficult for human. As shown in Fig. 6, those challenging ones are detected correctly by our detector, but some of them are even missed by the GT labelling, which may reduce our precision in evaluation.
Table 2: State-of-the-art results on the ICDAR 2011, 2013 and 2015.
全面评估是在五个基准数据集上进行的。图像分辨率在不同的数据集中显著不同。我们为SWT和ICDAR 2015设置图像短边为2000,其他三个的短边为600。我们将我们的性能与最近公布的结果[1,28,34]进行了比较。如表1和表2所示,我们的CTPN在所有的五个数据集上都实现了最佳性能。在SWT上,我们的改进对于召回和F-measure都非常重要,并在精确度上取得了很小的收益。我们的检测器在Multilingual上比TextFlow表现更好,表明我们的方法能很好地泛化到各种语言。在ICDAR 2013上,它的性能优于最近的TextFlow[28]和FASText[1],将F-measure从0.80提高到了0.88。精确度和召回率都有显著提高,改进分别超过$+5\%$和$+7\%$。此外,我们进一步与[8,11,35]比较了我们的方法,它们是在我们的首次提交后发布的。它始终在F-measure和召回率方面取得重大进展。这可能是由于CTPN在非常具有挑战性的文本上具有很强的检测能力,例如非常小的文本,其中一些甚至对人来说都很难。如图6所示,我们的检测器可以正确地检测到那些具有挑战性的图像,但有些甚至会被真实标签遗漏,这可能会降低我们的评估精度。
表2:ICDAR 2011,2013和2015上的最新结果。
We further investigate running time of various methods, as compared in Table 2. FASText [1] achieves 0.15s/image CPU time. Our method is slightly faster than it by obtaining 0.14s/image, but in GPU time. Though it is not fair to compare them directly, the GPU computation has become mainstream with recent great success of deep learning approaches on object detection [25,5,6]. Regardless of running time, our method outperforms the FASText substantially with $11\%$ improvement on F-measure. Our time can be reduced by using a smaller image scale. By using the scale of 450, it is reduced to 0.09s/image, while obtaining P/R/F of 0.92/0.77/0.84 on the ICDAR 2013, which are compared competitively against Gupta et al.’s approach [8] using 0.07s/image with GPU.
我们进一步调查了各种方法的运行时间,在表2中进行了比较。FASText[1]达到0.15s每张图像的CPU时间。我们的方法比它快一点,取得了0.14s每张图像,但是在GPU时间上。尽管直接比较它们是不公平的,但GPU计算已经成为主流,最近在目标检测方面的深度学习方法[25,5,6]上取得了很大成功。无论运行时间如何,我们的方法都大大优于FASText,F-measure的性能提高了$11%$。我们的时间可以通过使用较小的图像尺度来缩短。在ICDAR 2013中,使用450的缩放比例时间降低到0.09s每张图像,同时获得0.92/0.77/0.84的P/R/F,与Gupta等人的方法[8]相比,GPU时间为0.07s每张图像,我们的方法是具有竞争力的。
5. Conclusions
We have presented a Connectionist Text Proposal Network (CTPN) —— an efficient text detector that is end-to-end trainable. The CTPN detects a text line in a sequence of fine-scale text proposals directly in convolutional maps. We develop vertical anchor mechanism that jointly predicts precise location and text/non-text score for each proposal, which is the key to realize accurate localization of text. We propose an in-network RNN layer that connects sequential text proposals elegantly, allowing it to explore meaningful context information. These key technical developments result in a powerful ability to detect highly challenging text, with less false detections. The CTPN is efficient by achieving new state-of-the-art performance on five benchmarks, with 0.14s/image running time.
5. 结论
我们提出了连接文本提议网络(CTPN)—— 一种可端到端训练的高效文本检测器。CTPN直接在卷积映射的一系列细粒度文本提议中检测文本行。我们开发了垂直锚点机制,联合预测每个提议的精确位置和文本/非文本分数,这是实现文本准确定位的关键。我们提出了一个网内RNN层,可以优雅地连接顺序文本提议,使其能够探索有意义的上下文信息。这些关键技术的发展带来了检测极具挑战性的文本的强大能力,同时减少了误检。通过在五个基准数据集测试中实现了最佳性能,每张图像运行时间为0.14s,CTPN是有效的。
References
Busta, M., Neumann, L., Matas, J.: Fastext: Efficient unconstrained scene text detector (2015), in IEEE International Conference on Computer Vision (ICCV)
Cheng, M., Zhang, Z., Lin, W., Torr, P.: Bing: Binarized normed gradients for objectness estimation at 300fps (2014), in IEEE Computer Vision and Pattern Recognition (CVPR)
Epshtein, B., Ofek, E., Wexler, Y.: Detecting text in natural scenes with stroke width transform (2010), in IEEE Computer Vision and Pattern Recognition (CVPR)
Everingham, M., Gool, L.V., Williams, C.K.I., Winn, J., Zisserman, A.: The pascal visual object classes (voc) challenge. International Journal of Computer Vision (IJCV) 88(2), 303–338 (2010)
Girshick, R.: Fast r-cnn (2015), in IEEE International Conference on Computer Vision (ICCV)
Girshick, R., Donahue, J., Darrell, T., Malik, J.: Rich feature hierarchies for accurate object detection and semantic segmentation (2014), in IEEE Computer Vision and Pattern Recognition (CVPR)
Graves, A., Schmidhuber, J.: Framewise phoneme classification with bidirectional lstm and other neural network architectures. Neural Networks 18(5), 602–610 (2005)
Gupta, A., Vedaldi, A., Zisserman, A.: Synthetic data for text localisation in natural images (2016), in IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
He,P.,Huang,W.,Qiao,Y.,Loy,C.C.,Tang,X.:Readingscenetextindeepconvo- lutional sequences (2016), in The 30th AAAI Conference on Artificial Intelligence (AAAI-16)
He, T., Huang, W., Qiao, Y., Yao, J.: Accurate text localization in natural image with cascaded convolutional text network (2016), arXiv:1603.09423
He, T., Huang, W., Qiao, Y., Yao, J.: Text-attentional convolutional neural net- works for scene text detection. IEEE Trans. Image Processing (TIP) 25, 2529–2541 (2016)
Hochreiter, S., Schmidhuber, J.: Long short-term memory. Neural Networks 9(8), 1735–1780 (1997)
Huang, W., Lin, Z., Yang, J., Wang, J.: Text localization in natural images using stroke feature transform and text covariance descriptors (2013), in IEEE International Conference on Computer Vision (ICCV)
Huang, W., Qiao, Y., Tang, X.: Robust scene text detection with convolutional neural networks induced mser trees (2014), in European Conference on Computer Vision (ECCV)
Jaderberg, M., Simonyan, K., Vedaldi, A., Zisserman, A.: Reading text in the wild with convolutional neural networks. International Journal of Computer Vision (IJCV) (2016)
Jaderberg, M., Vedaldi, A., Zisserman, A.: Deep features for text spotting (2014), in European Conference on Computer Vision (ECCV)
Jia, Y., Shelhamer, E., Donahue, J., Karayev, S., Long, J., Girshick, R., Guadarrama, S., Darrell, T.: Caffe: Convolutional architecture for fast feature embedding (2014), in ACM International Conference on Multimedia (ACM MM)
Karatzas,D.,Gomez-Bigorda,L.,Nicolaou,A.,Ghosh,S.,Bagdanov,A.,Iwamura, M., Matas, J., Neumann, L., Chandrasekhar, V.R., Lu, S., Shafait, F., Uchida, S.,Valveny, E.: Icdar 2015 competition on robust reading (2015), in International Conference on Document Analysis and Recognition (ICDAR)
Karatzas, D., Shafait, F., Uchida, S., Iwamura, M., i Bigorda, L.G., Mestre, S.R., Mas, J., Mota, D.F., Almazan, J.A., de las Heras., L.P.: Icdar 2013 robust reading competition (2013), in International Conference on Document Analysis and Recognition (ICDAR)
Mao, J., Li, H., Zhou, W., Yan, S., Tian, Q.: Scale based region growing for scene text detection (2013), in ACM International Conference on Multimedia (ACM MM)
Minetto, R., Thome, N., Cord, M., Fabrizio, J., Marcotegui, B.: Snoopertext: A multiresolution system for text detection in complex visual scenes (2010), in IEEE International Conference on Pattern Recognition (ICIP)
Neumann, L., Matas, J.: Efficient scene text localization and recognition with local character refinement (2015), in International Conference on Document Analysis and Recognition (ICDAR)
Neumann, L., Matas, J.: Real-time lexicon-free scene text localization and recognition. In IEEE Trans. Pattern Analysis and Machine Intelligence (TPAMI) (2015)
Pan, Y., Hou, X., Liu, C.: Hybrid approach to detect and localize texts in natural scene images. IEEE Trans. Image Processing (TIP) 20, 800–813 (2011)
Ren, S., He, K., Girshick, R., Sun, J.: Faster R-CNN: Towards real-time object detection with region proposal networks (2015), in Neural Information Processing Systems (NIPS)
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S., Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bernstein, M., Berg, A.C., Li, F.: Imagenet large scale visual recognition challenge. International Journal of Computer Vision (IJCV) 115(3), 211–252 (2015)
Simonyan, K., Zisserman, A.: Very deep convolutional networks for large-scale image recognition (2015), in International Conference on Learning Representation (ICLR)
Tian, S., Pan, Y., Huang, C., Lu, S., Yu, K., Tan, C.L.: Text flow: A unified text detection system in natural scene images (2015), in IEEE International Conference on Computer Vision (ICCV)
Wang, K., Babenko, B., Belongie, S.: End-to-end scene text recognition (2011), in IEEE International Conference on Computer Vision (ICCV)
Wolf, C., Jolion, J.: Object count / area graphs for the evaluation of object detection and segmentation algorithms. International Journal of Document Analysis 8, 280–296 (2006)
Yao, C., Bai, X., Liu, W.: A unified framework for multioriented text detection and recognition. IEEE Trans. Image Processing (TIP) 23(11), 4737–4749 (2014)
Yin, X.C., Pei, W.Y., Zhang, J., Hao, H.W.: Multi-orientation scene text detection with adaptive clustering. IEEE Trans. Pattern Analysis and Machine Intelligence (TPAMI) 37, 1930–1937 (2015)
Yin, X.C., Yin, X., Huang, K., Hao, H.W.: Robust text detection in natural scene images. IEEE Trans. Pattern Analysis and Machine Intelligence (TPAMI) 36, 970–983 (2014)
Zhang, Z., Shen, W., Yao, C., Bai, X.: Symmetry-based text line detection in natural scenes (2015), in IEEE Computer Vision and Pattern Recognition (CVPR)
Zhang, Z., Zhang, C., Shen, W., Yao, C., Liu, W., Bai, X.: Multi-oriented text de- tection with fully convolutional networks (2016), in IEEE Conference on Computer Vision and Pattern Recognition (CVPR)

